
树形动态规划的解题思路
方法论
之前用二叉树递归解决问题时,总是凭感觉在写递归,状态差时就很容易被绕进去。直到最近学到一套利用树形动态规划解决问题的通用方法,才明白原来思路可以这样清晰,只需要列全可能性,问题就被解决了一大半。
该方法适用于树形动态规划问题,其具体操作如下:
- 假设以 X 节点为头,假设可以向 X 左树和 X 右树要任何信息
- 在上一步的假设下,讨论以 X 为头节点的树,得到答案的可能性(最重要)
- 列出所有可能性后,确定到底需要向左树和右树要什么样的信息
- 把左树信息和右树信息求全集,就是任何一棵子树都需要返回的信息 S
- 递归函数都返回 S,每一棵子树都这么要求
- 写代码,在代码中考虑如何把左树的信息和右树信息整合出整棵树的信息
动态规划:通过把原问题分解为相对简单的子问题的方式求解复杂问题的方法,常常适用于有重叠子问题和最优子结构性质的问题。
我们举几道题目来应用以上方法。
判断是否为满二叉树
满二叉树,即对一棵二叉树中的所有子节点而言,要么没有孩子,要么同时有左右两个孩子。
本题很简单,首先我们确定本节点需要向左右子节点询问什么信息,由上面的满二叉树定义可以得知,如果一棵树是满二叉树,则须满足:
- 根节点的左右子树都是满二叉树
- 根节点的左右子节点要么都是空,要么都不为空
注意,第一个要求很容易被忽略!这类要求是解决树形动态规划的关键!它将原问题又分解成类似的子问题,达到各个击破 ,后面的例子也会见到类似的要求。
因此 X 节点需要向其左右子节点索要的信息为:
- 你(即该子节点)是否为满二叉树
- 你是否为空
所以就很容易得到如下代码:
//0-null, 1-true, 2-false
int judgeFullTree_in(TreeNode* root)
{
if(root == nullptr)
return 0;
int lc = judgeFullTree_in(root->left);
int rc = judgeFullTree_in(root->right);
if(lc == 0 && rc == 0)
return 1;
if(lc == 1 && rc == 1)
return 1;
if(lc + rc == 1)
return 2;
if(lc == 2 || rc == 2)//子树是否都为满二叉树
return 2;
}
bool judgeFullTree(TreeNode* root)
{
int ret = judgeFullTree_in(root);
if(ret == 0 || ret == 1)
return true;
else
return false;
}
判断是否为平衡二叉树
平衡二叉树:树中每个节点的左右两子树高度差都不超过 1 的二叉树。
根据定义,我们得知一棵树如果为平衡二叉树,则树中任意节点的左右子树为平衡二叉树,且左右子树的高度差不大于 1。
所以 X 节点应该向左右子节点索要如下信息:
- 你自己是否为平衡二叉树(空节点视为平衡二叉树)
- 你的高度
如果左右子树都为平衡二叉树,则比较两子树高度的差值是否大于 1,然后返回判断结果。
struct info
{
bool isAVL;
int height;
info(bool _isAVL, int _height):isAVL(_isAVL), height(_height){}
};
info process(TreeNode* node)
{
if(node == nullptr)
return info(true, 0);
info left = process(node->left);
info right = process(node->right);
if(!left.isAVL || !right.isAVL || abs(left.height - right.height) > 1)
return info(false, -1); //此时不用再判断高度,可传任意值
return info(true, std::max(left.height, right.height) + 1);
}
bool judgeAVL(TreeNode* root)
{
if(root == nullptr)
return true;
return process(root).isAVL;
}
判断是否为搜索二叉树
二叉搜索树是指一棵空树或者具有下列性质的二叉树:
- 若任意节点的左子树不空,则左子树上所有节点的值均小于它的根节点的值;
- 若任意节点的右子树不空,则右子树上所有节点的值均大于它的根节点的值;
- 任意节点的左、右子树也分别为二叉查找树;
由上面的定义我们很快能推断出 X 节点应该向左右子树索要如下信息:
- 你自己是否为搜索二叉树
- 你树中的最大值和最小值
第二点需要强调的是,根据定义,对于左子树而言应索要最大值;对于右子树而言应索要最小值。虽然对左子树和右子树的要求不同,但这整个过程是在同一个递归函数中进行的,你无法分别对左子树返回最大值,而对右子树返回最小值,只能求两者的全集,后续整理信息时才可以区别对待。代码如下:
struct info
{
int flag;//-1=null, 0=false, 1=true
int max;
int min;
info(int _flag):flag(_flag){};
info(int _flag, int _max, int _min):flag(_flag), max(_max), min(_min){}
};
info progress(TreeNode* node)
{
if(node == nullptr)
return info(-1);
info left = progress(node->left);
info right = progress(node->right);
if(left.flag == -1 && right.flag == -1)
return info(1, node->data, node->data);
if(left.flag == -1 && right.flag == 1 && right.min > node->data)
return info(1, right.max, node->data);
if(left.flag == 1 && right.flag == -1 && left.max < node->data)
return info(1, node->data, left.min);
if(left.flag == 1 && right.flag == 1 && left.max < node->data && right.min > node->data)
return info(1, right.max, left.min);
return info(0); //其他情况一律为false
}
bool judgeBST(TreeNode* root)
{
if(root == nullptr)
return true;
return progress(root).flag;
}
当 node 为 nullptr 时,此处的处理和之前的几道题有所不同。因为本题中当 node 为 nullptr 时,你不好确定这个空节点的 max 和 min 为多少,所以我们兼用 info 结构体中的 flag 变量来判别节点是否为空(flag = -1 时),然后在上游专门处理节点为空的情况。
二叉树的直径
二叉树的直径是指树中任意两个节点之间最长路径的长度
比如下图的最长路径为 5 ,即路径 6-4-2-5-7-8:
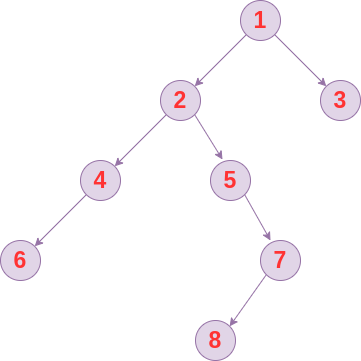
思考后容易知道,最长路径的长度一定为某个节点的左子树高度加上右子树的高度。对每个节点我们求出左子树和右子树的高度和,然后比较整棵树中所有节点的高度和,最大的那个高度和即为二叉树的直径。所以 X 节点需要向左右子树索要以下信息:
- 你的高度
- 你的最大高度和
X 节点得到左右子树的高度和后,将本节点的高度和与左子树和右子树的最大高度和进行比较,选出最大的那个高度和,作为本节点的最大高度和,返回返回信息体即可。代码如下:
struct info
{
int height;
int maxDis;
info(int height, int dis):height(height), maxDis(dis){}
};
info findMaxDis_in(TreeNode* nd)
{
if(nd == nullptr)
{
info inf(0, 0);
return inf;
}
info infl = findMaxDis_in(nd->left);
info infr = findMaxDis_in(nd->right);
info infc(0, 0);
infc.maxDis = std::max(std::max(infl.maxDis, infr.maxDis), infl.height + infr.height);
infc.height = std::max(infl.height, infr.height) + 1; //别忘了本节点还要+1
return infc;
}
int findMaxDis(TreeNode* root)
{
info inf = findMaxDis_in(root);
return std::max(inf.height - 1, inf.maxDis);//根节点没有父节点,需要-1
}
最近公共祖先
题名即含义,如下图:
比如 6 和 5 的最近公共祖先为 2 ;
8 和 3 的最近公共祖先为 1 ;
注意,4 和 2 的最近公共祖先就为 2 自己。
以 4 和 7 节点为例,可推理处理过程如下:
- 从 1 节点开始后序遍历,遍历到 4 节点时,发现目标节点,记录相应信息,然后继续遍历
- 后序遍历到 7 节点时,发现目标节点,记录相应信息,继续遍历
- 后序遍历到 2 节点时,此时发现 2 节点的左右子树都有目标节点的信息,所以本节点就为目标节点的公共祖先,记录信息并返回
所以推断 X 节点应该向左右子树索要如下信息:
-
目标节点记录
-
是否已经找到公共祖先
struct info { TreeNode* anc; TreeNode* target; info():anc(nullptr), target(nullptr){} info(TreeNode* _anc, TreeNode* tar): anc(_anc), target(tar){} }; info process(TreeNode* root, TreeNode* a, TreeNode* b) { if(root == nullptr) return info(); info left = process(root->left, a, b); info right = process(root->right, a, b); info cur; //下行容易忽略,往上传递子树中已经找到的目标 cur.target = (left.target == nullptr ? (right.target == nullptr ? nullptr : right.target) : left.target); cur.anc = (left.anc == nullptr ? (right.anc == nullptr ? nullptr : right.anc) : left.anc); if(cur.anc != nullptr) return cur; if(left.target != nullptr && right.target != nullptr) cur.anc = root; if(root == a) { cur.target = root; if(left.target == b || right.target == b) cur.anc = root; } if(root == b) { cur.target = root; if(left.target == a || right.target == a) cur.anc = root; } return cur; } TreeNode* ancestor(TreeNode* root, TreeNode* a, TreeNode* b) { info inf = process(root, a, b); return inf.anc; }
派对的最大快乐值
本题非常漂亮,因此笔者为其单独写了一篇文章,参见派对的最大快乐值。
本题中,X 节点向各个子节点索要的信息为:你参加或者不参加派对时,你所有下属的最大快乐值为多少。
总结
以上问题都可以归结为树形动态规划问题,其特点是可以将整个问题分解相似的子问题,然后由下到上逐个击破。这套方法的代码可能不是最简洁或者最快的,但它为我们提供了固定的模式,能够快速指明解题方向。
参考:左程云算法课程